InterPol Transport Full Motion Robot
Propiedad
Historia
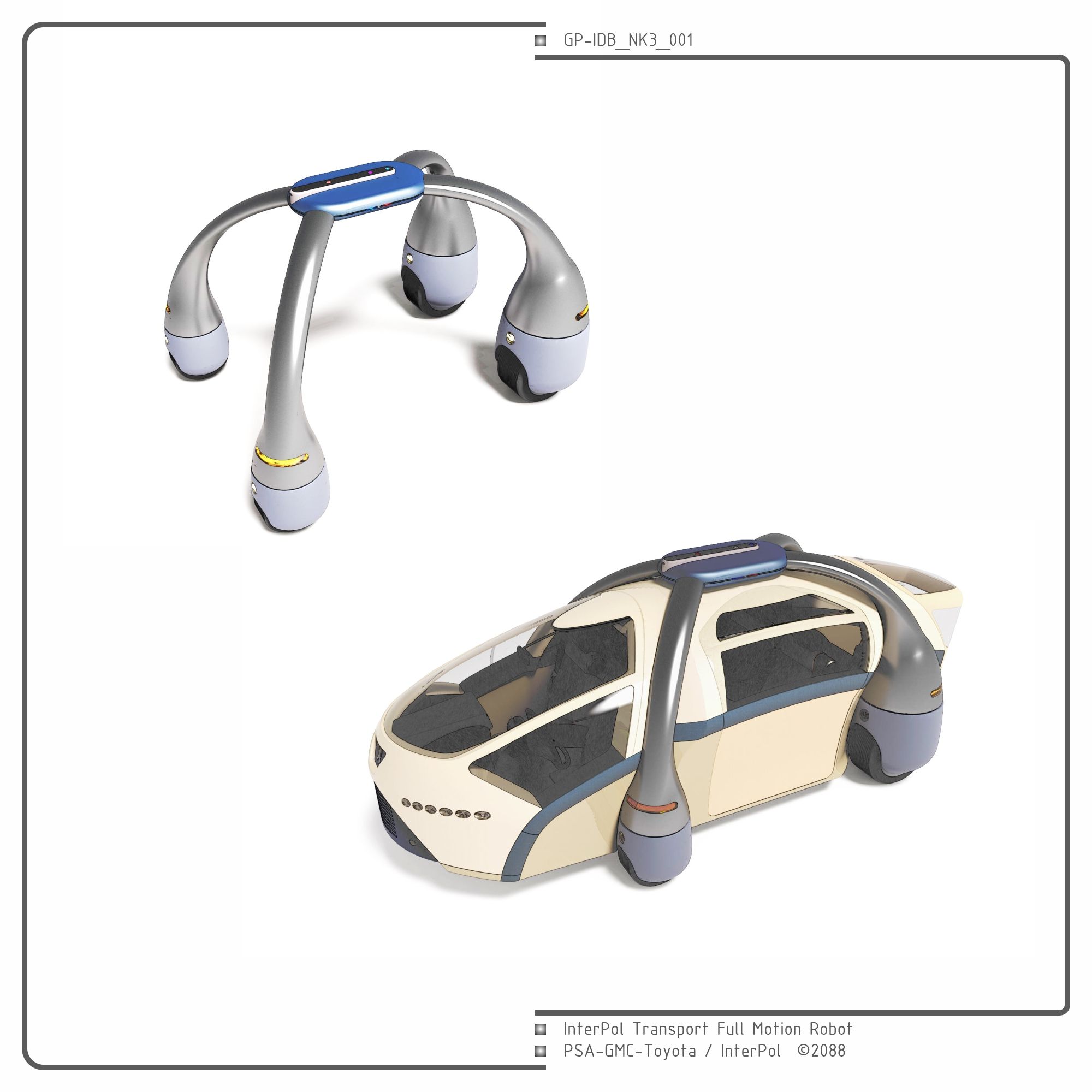
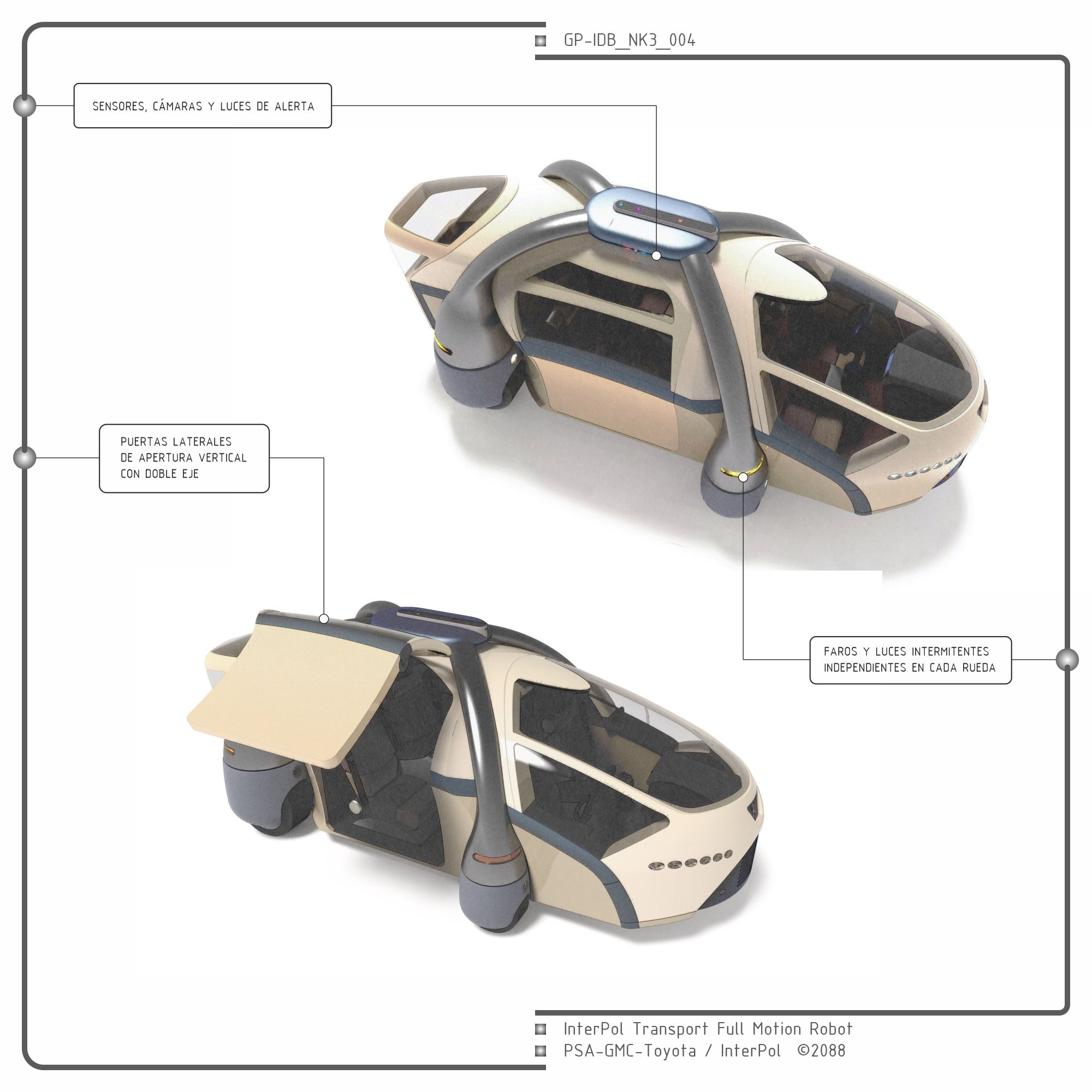
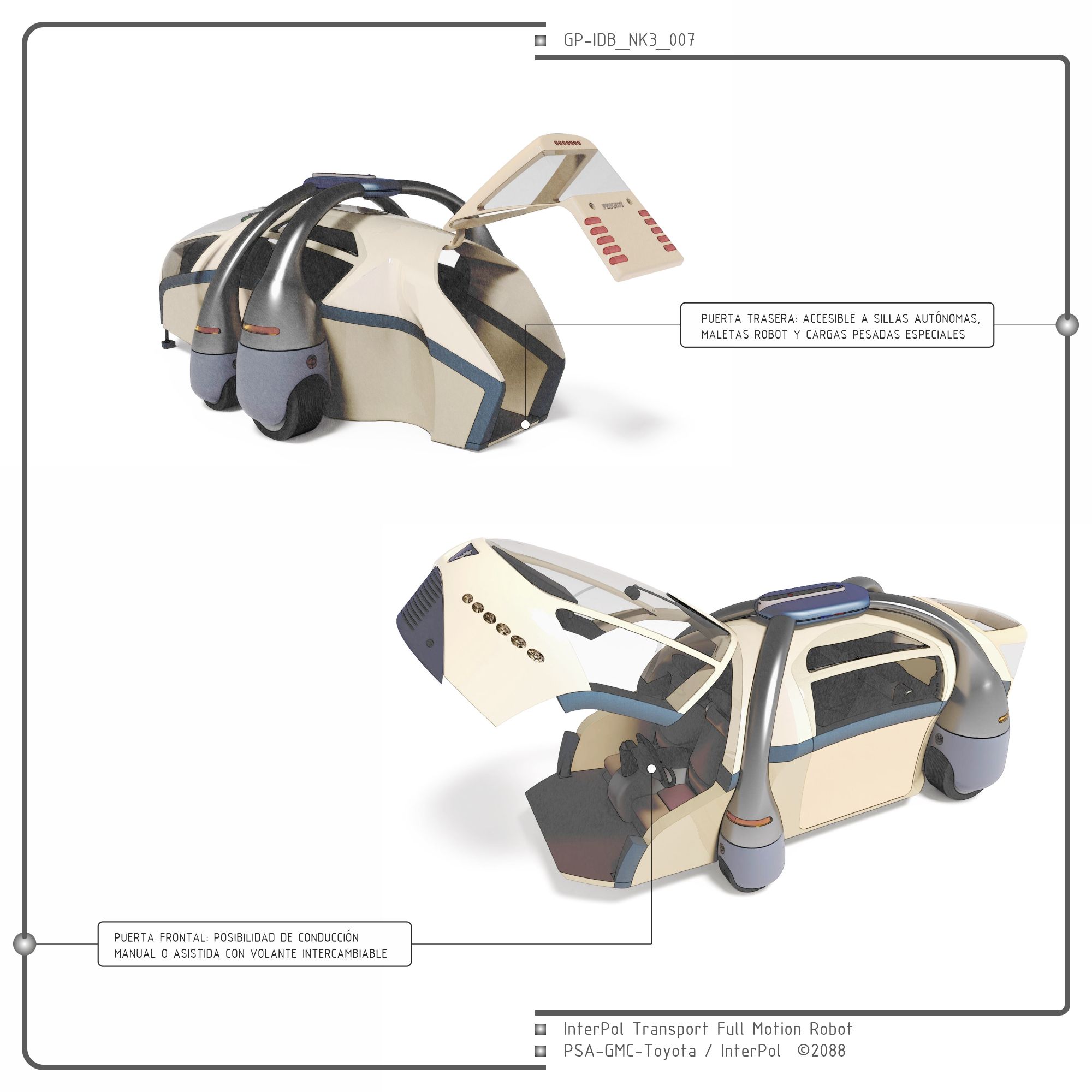
Los NEKSIA disponen de cámaras estereoscópicas y holográficas y su procesador de anamorfita les permite la detección de armas con munición electrónica, operar coordinados entre ellos en todo el mundo y desde las centrales InterPol de cada continente. Pueden perseguir, bloquear y detener a cualquier vehículo sospechoso que re huya un control migracional.
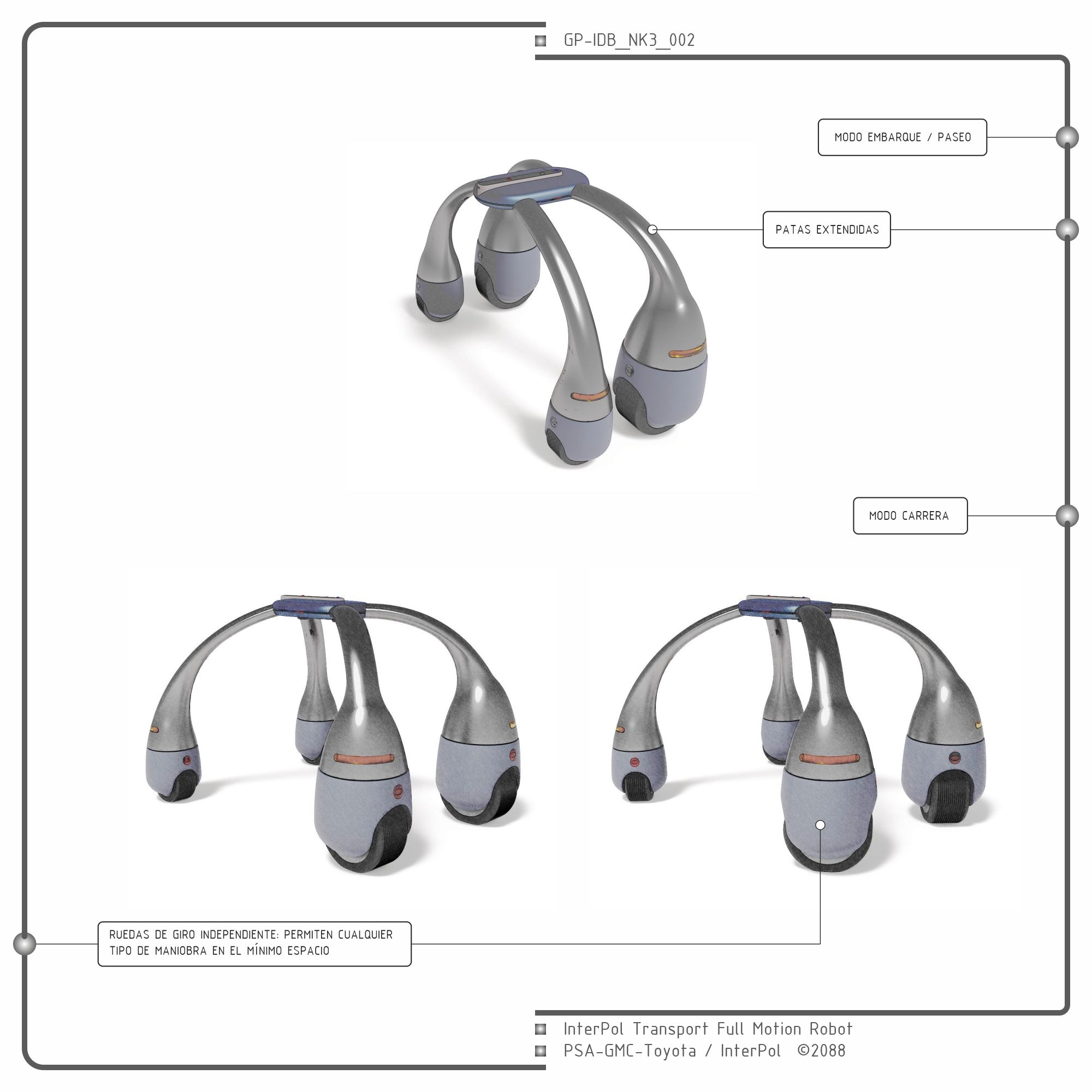
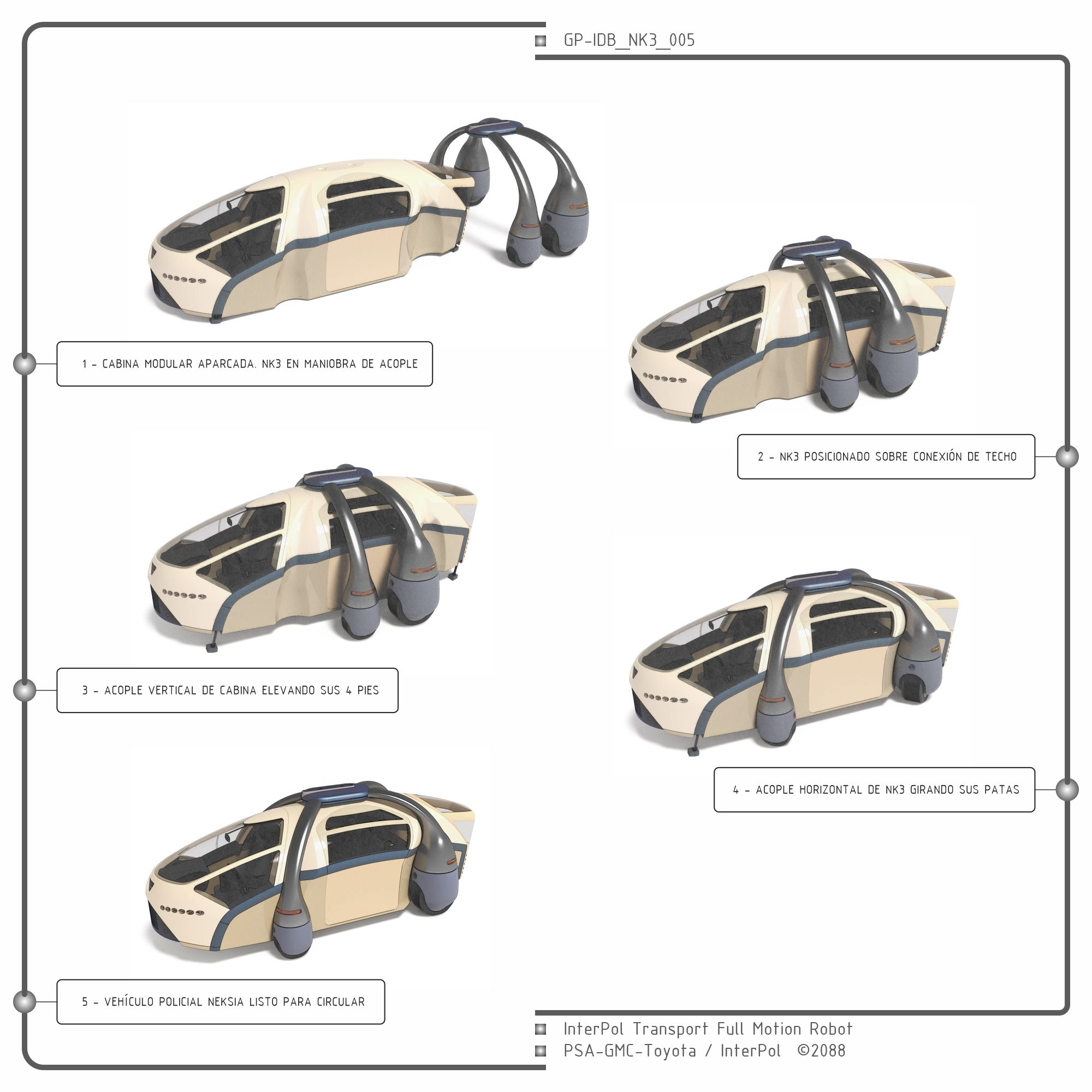
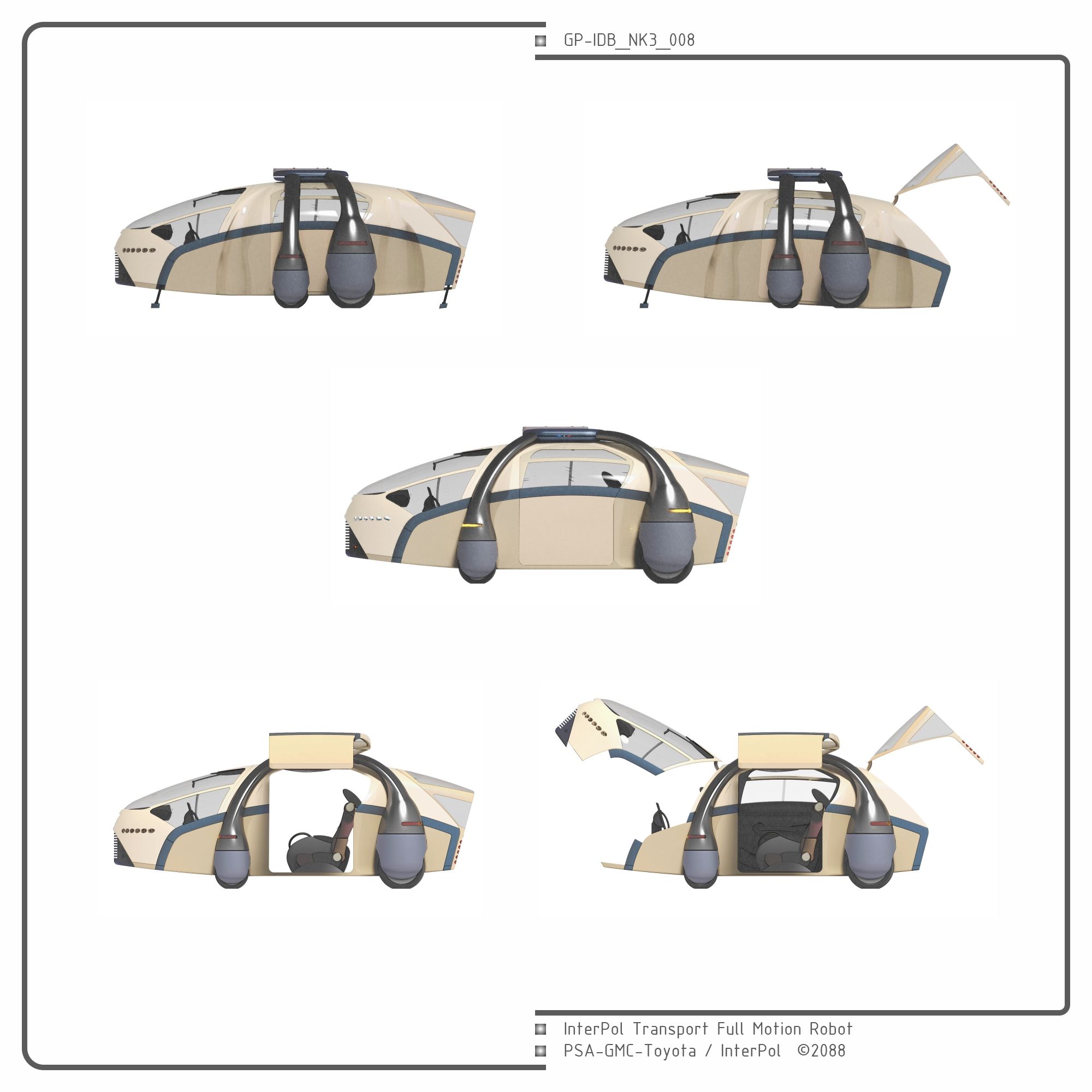
El diseño de todo el programa NEKSIA fue realizado con software inteligente de creación, recurriendo a los últimos avances en algoritmia para adecuar el aspecto del «nuevo policía» a los requisitos de la Nueva Era: Interracial, Intercultural, Ecológico y Autónomo. Su aspecto de animal cuadrúpedo transmite sensaciones de confianza y respeto por igual. Su estructura ultraligera de tecnopolímeros es indeformable, y sus potentes cuatro motores de giro libre le proporcionan la mayor flexibilidad de ruta en cualquier vía urbana, tanto en calzadas como aceras peatonales. Los distintos modelos de cabinas de pasajeros poseen su propio acumulador eléctrico, que alimenta las patas del robot cuando éste se acopla para los desplazamientos de personal de InterPol. Al operar el mismo modelo de robot en todo el planeta, es el vehículo más económico de fabricar y el de mayor número de unidades. Existen factorías NEKSIA en los cinco continentes.
Características
AUTONOMÍA:
Robot NK3: 70 km a 360 km/h
Con Cabina: 1.600 km a 200 km/h
FUENTE ENERGÉTICA: Acumuladores / Red Eléctrica Sociosistémica
RATIO ECO-ENERGÉTICO: 0,891
DIMENSIONES:
Robot NK3: 2.548×2.065×1.675 mm
Cabina: 4.310×1.610×1.515 mm