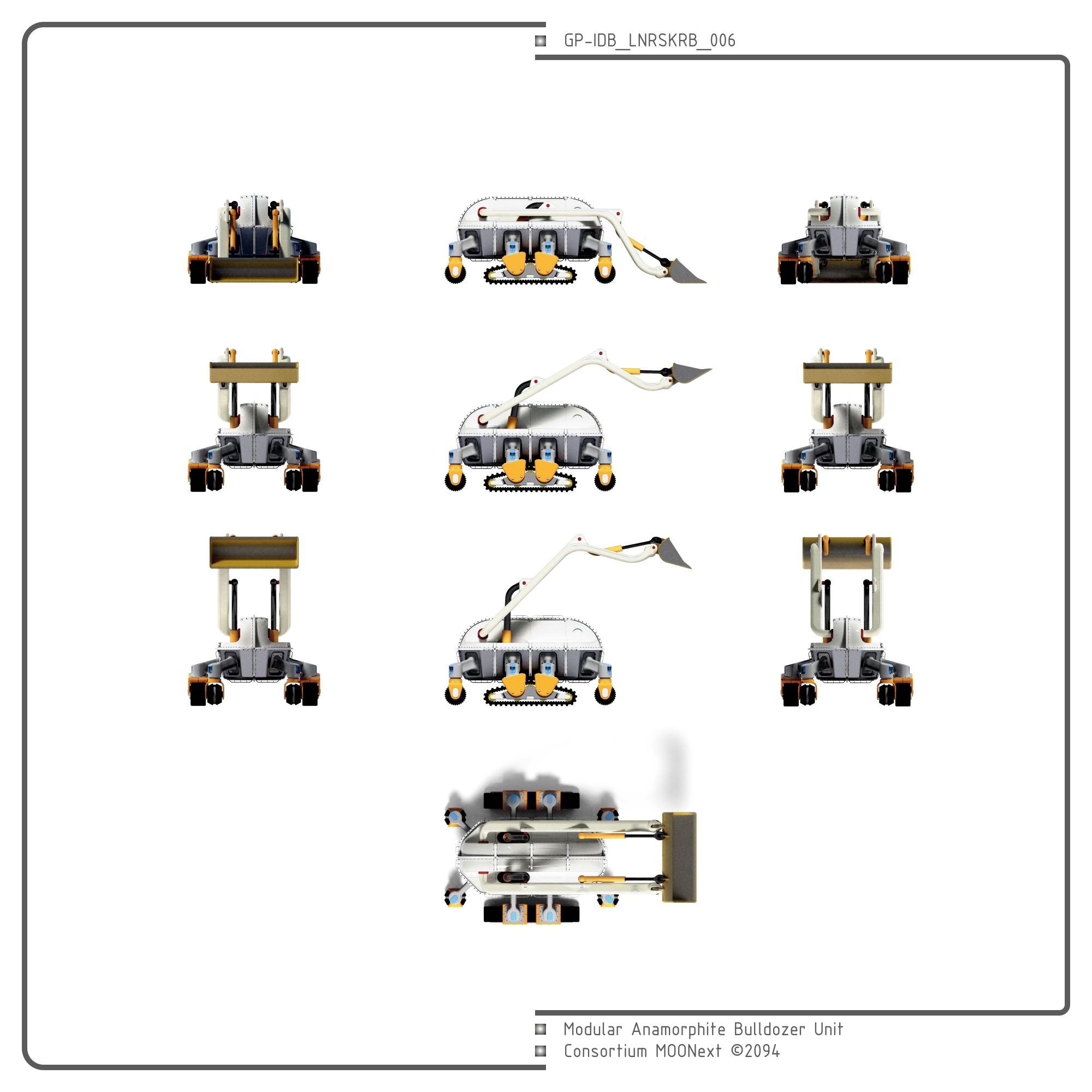
Modular Anamorphite Bulldozer Unit
Property
History
The chassis is printed with an albumin polymer at the satellite’s own factories. Only the raw material, engines, tracks and hydraulic units are transported from Earth. The assembly is carried out at the Luna-2 factory with fully automated processes.
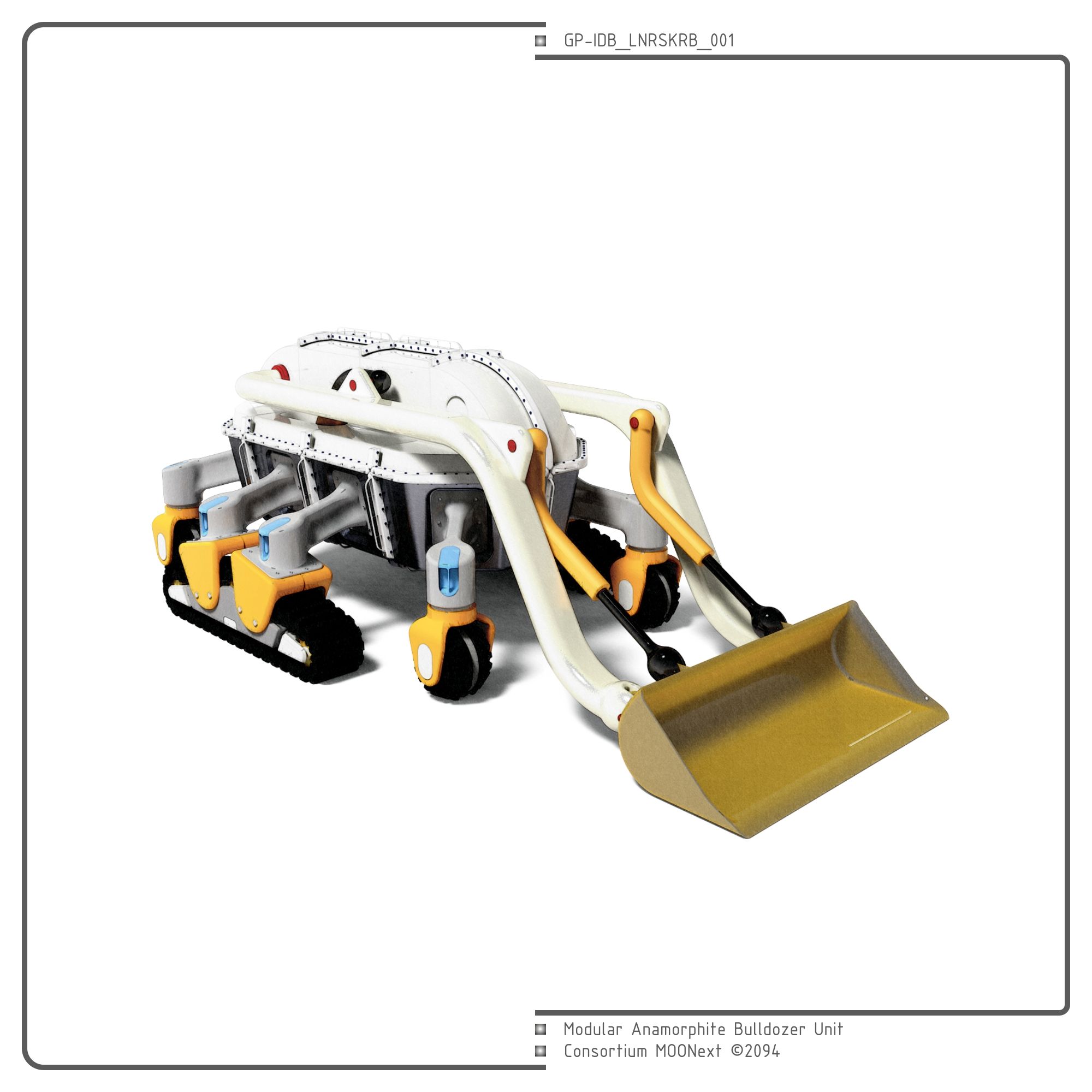
The Skarab units are a highly refined design of the autonomous bulldozer. They are responsible for levelling the area of exploitation and for creating paths for the circulation of wagons and other mining robots.
They work alone in an autonomous way, coordinated with the rest of the drilling, extraction and transport machinery.
Characteristics
PAYLOAD: 500 Tm at Maximum Thrust
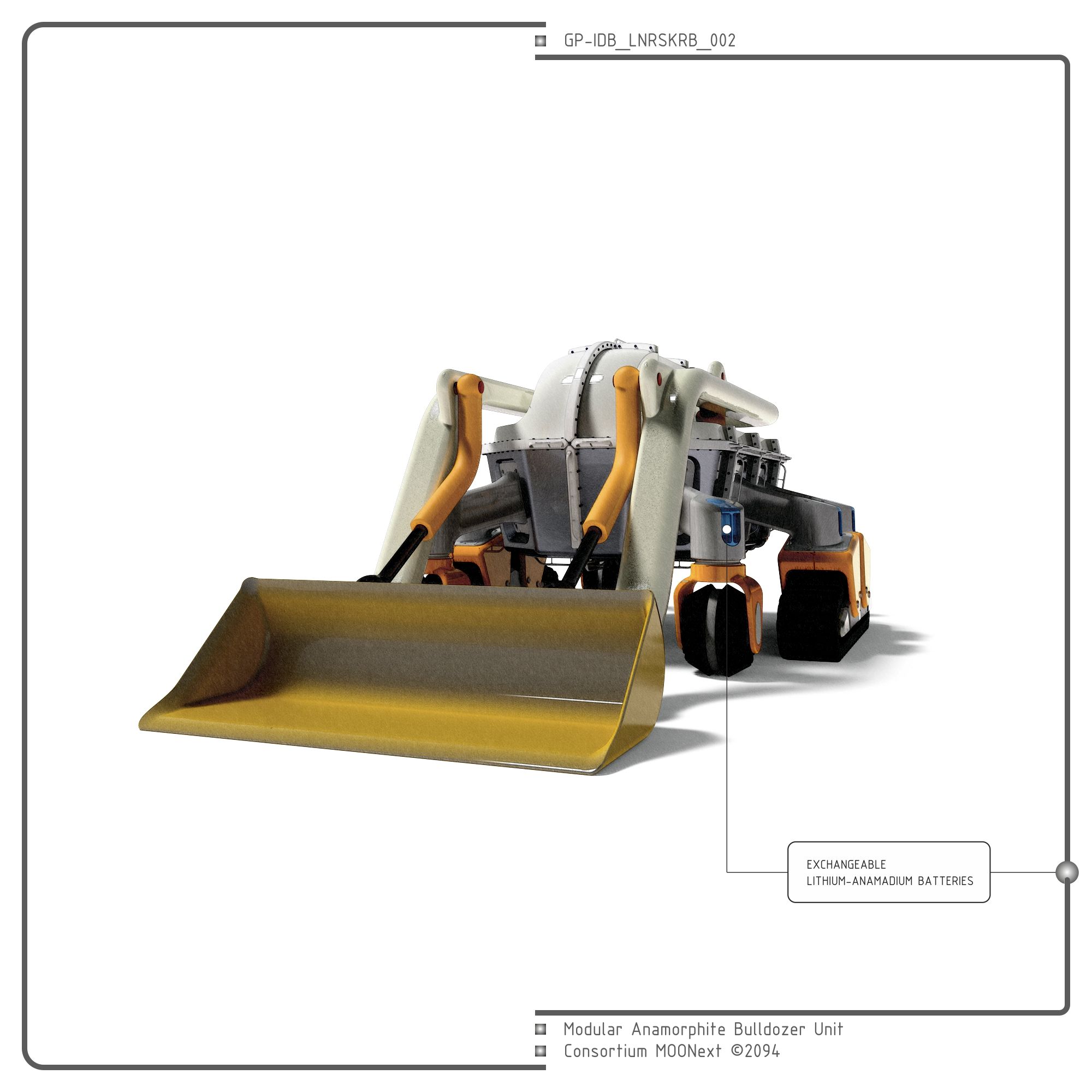
POWER SOURCE: Moon electricity. Stored in Lithium-Amamadium batteries
ECOENERGETIC RATIO: 1.000
DIMENSIONS:
Body: 5,200 x 6,840 x 3,540 mm
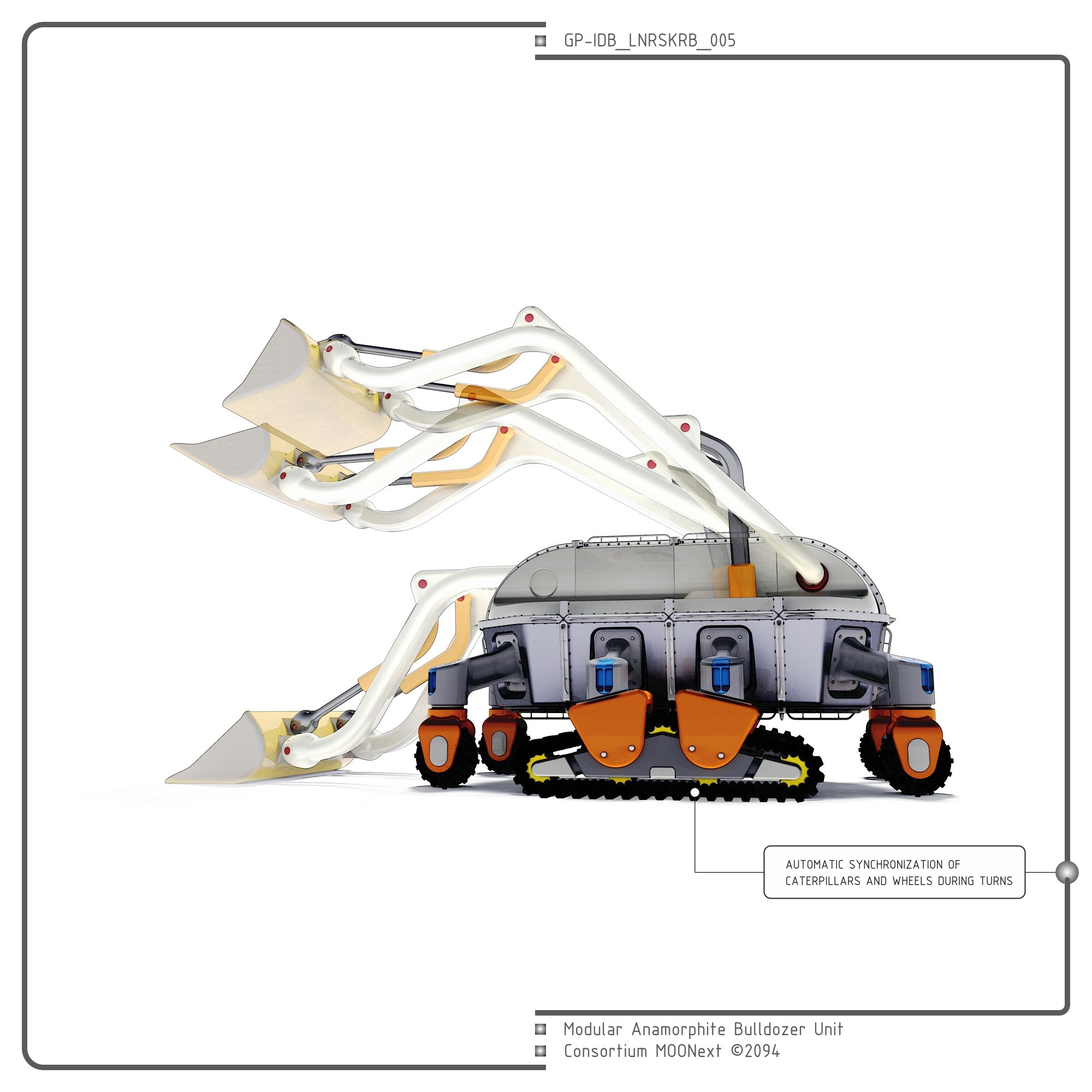
Blade: 3,500 x 975 x 1,500 mm
Max. Height: 6,000 mm